Installing Hardware
Before your motion application can be up and running, you first need to connect, wire and configure all your hardware components.
The Getting Started guide contains procedures for installing and configuring hardware components (HMI![]() "Human-machine interfaces "
Also known as computer-human interfaces (CHI), and formerly known as man-machine interfaces, they are usually employed to communicate with PLCs and other computers, such as entering and monitoring temperatures or pressures for further automated control or emergency response, controllers, I/O Terminals, EtherCAT
"Human-machine interfaces "
Also known as computer-human interfaces (CHI), and formerly known as man-machine interfaces, they are usually employed to communicate with PLCs and other computers, such as entering and monitoring temperatures or pressures for further automated control or emergency response, controllers, I/O Terminals, EtherCAT![]() EtherCAT is an open, high-performance Ethernet-based fieldbus system. The development goal of EtherCAT was to apply Ethernet to automation applications which require short data update times (also called cycle times) with low communication jitter (for synchronization purposes) and low hardware costs Motion Bus, AKD Drive, and AKM Motor).
EtherCAT is an open, high-performance Ethernet-based fieldbus system. The development goal of EtherCAT was to apply Ethernet to automation applications which require short data update times (also called cycle times) with low communication jitter (for synchronization purposes) and low hardware costs Motion Bus, AKD Drive, and AKM Motor).
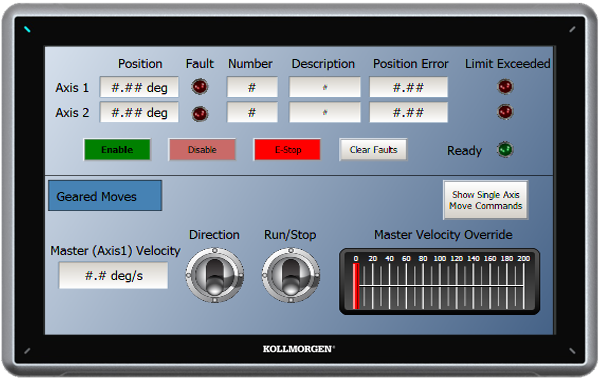
Figure 4-1: Connecting all the Hardware components
-
-
For extensive information about installing the different hardware components, see the relevant documentation available on:
- Kollmorgen Website
- KAS IDE
 "Integrated development environment"
An integrated development environment is a type of computer software that assists computer programmers in developing software.
IDEs normally consist of a source code editor, a compiler and/or interpreter, build-automation tools, and a debugger online help (after it has been installed)
"Integrated development environment"
An integrated development environment is a type of computer software that assists computer programmers in developing software.
IDEs normally consist of a source code editor, a compiler and/or interpreter, build-automation tools, and a debugger online help (after it has been installed)
- Kollmorgen Website
Links to installation instructions for hardware components can be found in the following table.
| Component | Installation | |
|---|---|---|
|
HMI (Human-Machine Interface) |
|
Install the graphic operator interface. |
| Controller |

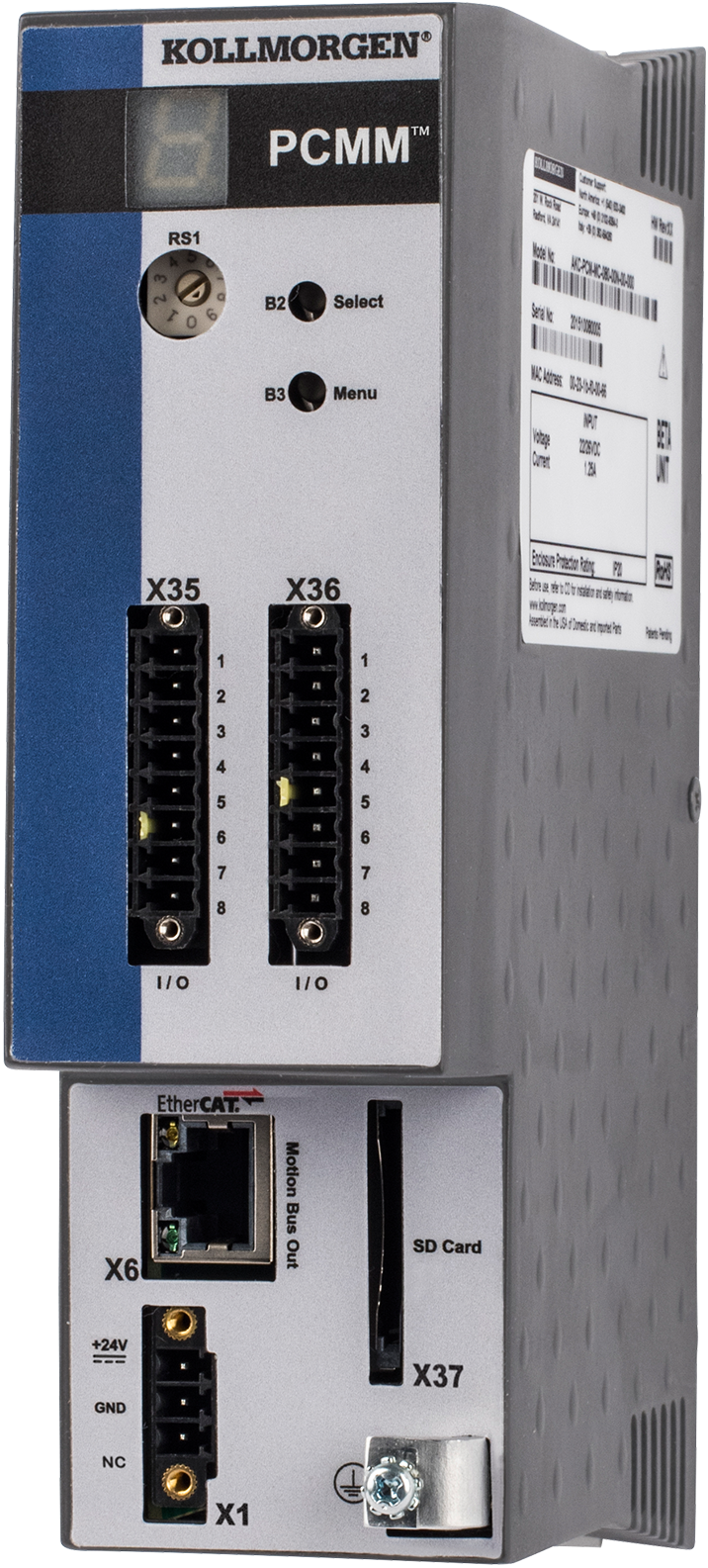
|
Install the PCMM or AKD PDMM controller. |
|
EtherCAT Motion Bus |
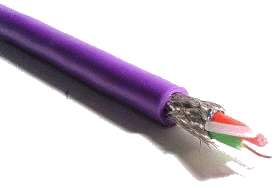
|
Set up EtherCAT Motion Bus Communication. See AKD™ EtherCAT Communication |
|
I/O Terminal |

|
Install the remote Input/Output Terminal. |
|
AKD Drive |


|
Install a AKD or AKD2G Drive. See AKD Installation Manual and also AKD Quick Start. Available from KDN: AKD Downloads |
|
AKM and AKM2G Motor |
|
Install the AKM or AKM2G Motor. Mechanical and Electrical installation. Available from KDN. AKM Downloads | AKM2G Downloads |
Table 4-1: Kollmorgen Automation Suite Installation and Configuration






